
利用 Spatial 的 3D 机器人 SDK 满足日益增长的需求
通过实施Spatial软件开发工具包 (SDK),在竞争中赢得先机。我们的自动化机械 SDK 是通过与机器人行业的领导者紧密合作,根据您的应用量身定制的。在您的应用程序中启用高级功能和复杂的自动化工程场景,从而显著提高工作流程的效率。



您的挑战
机器人技术面临的主要挑战
软件开发
采用离线编程(OLP)
开发高效、安全的离线编程解决方案,以取代人工技术,最大限度地减少停机时间和安全风险。无缝系统集成
确保控制软件、仿真工具和用户界面在不同平台上和谐运行,实现强大的互操作性。降低材料和时间成本
将复杂的机器人系统与生产流程相结合,以优化资源利用和简化操作。优化设计和工作流程
缩短设计周期,减少错误,并创建适应设计限制和特定最终用户工作流程的软件。



我们的 SDK 如何解决
机器人技术的关键挑战
整合不同Spatial组件的强大应用框架
应用图形管理器(AGM)深受全球机器人客户的欢迎。AGM 是与多家机器人客户合作开发的,具有专门的弧焊和机器人选项卡,用户可以轻松演示弧焊、点焊、快速碰撞检查和逆运动学。这些功能大大缩短了应用开发时间。
机器人应用的互操作性
使用 3D InterOp 可加载或导入机器人、工件、设施等数据。不同来源的数据可以集成在一起,从而促进数字工厂中的协作和数据一致性。

强大的 3D 引擎
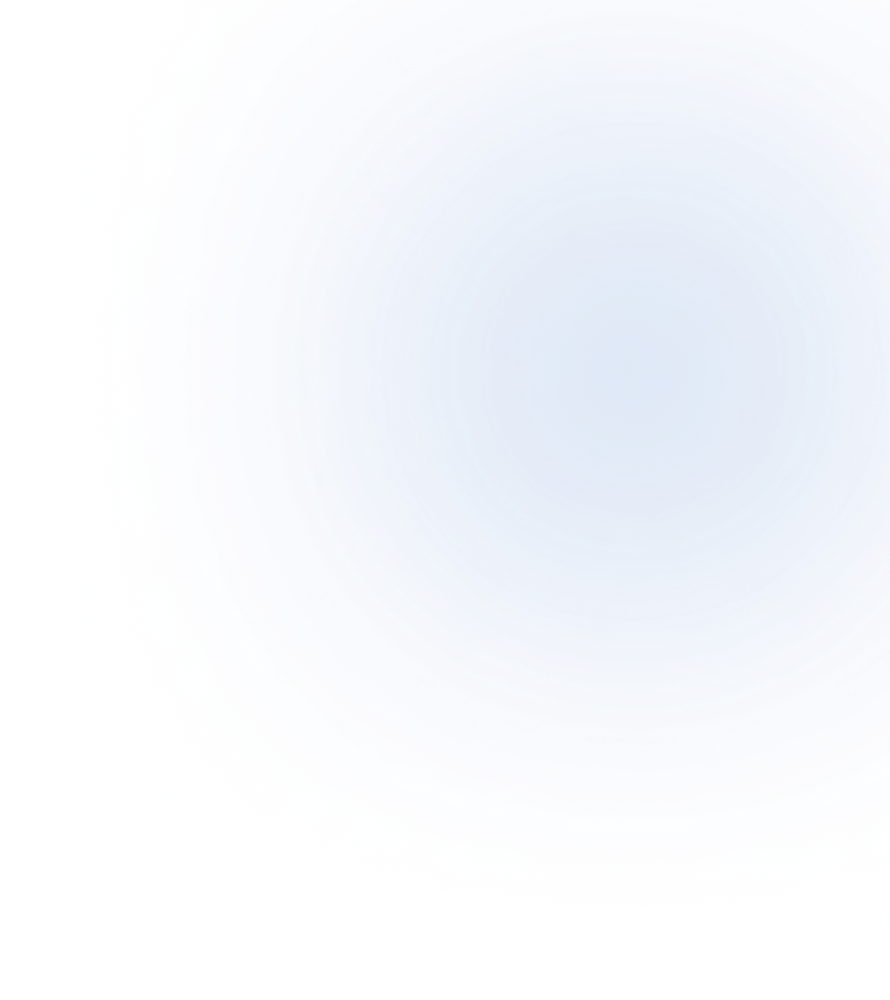
借助 CGM Modeler、3D ACIS Modeler 和 CGM Polyhedra 的强大功能,您可以在应用中生成示教点以及布局机器人和工件。
清晰的可视化和运动
使用用于逆运动学的 CDS 或 AGM 以及用于动画的 HOOPS Visualize 模拟运动。为数字工厂双胞胎提供复杂的支持。

1.打开文件
- 导入几何图形
- 可视化数据
- 尺寸和公差


2.教学
- 查询几何图形
- 曲面和曲线采样
- 偏移曲面




3.模拟运动
- 逆运动学
- 碰撞检测



4.检查和优化
- 边界框检查
- 体-体检查
- 细分检查
- 快速碰撞检查

5.可视化
- 桌面和网络浏览器
专为机器人工作流程打造的功能
Spatial 解决方案的内置功能可满足机器人行业和数字化工厂的独特需求。
无论是数字孪生、自动化和机器人、快速成型制造,还是仿真和优化,Spatial SDKs 的功能都能帮助您实现开发目标、
Spatial SDK 的功能都能帮助您实现开发目标。
无论是数字孪生、自动化和机器人、快速成型制造,还是仿真和优化,Spatial SDKs 的功能都能帮助您实现开发目标、
Spatial SDK 的功能都能帮助您实现开发目标。
语义 PMI 导入
机器人路径规划和运动学管理
减少切面以优化几何形状
为Spatial分析创建通关量
利用点云数据进行结果分析
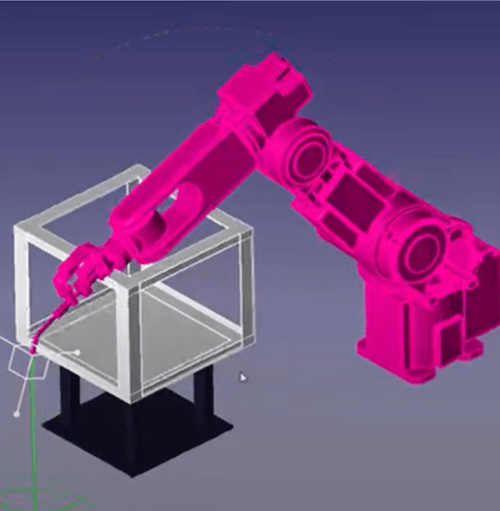
离线模拟机器人编程
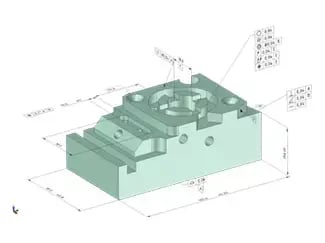
语义 PMI 导入
捕捉设计意图
3D InterOp 支持图形和语义形式的产品制造信息,具有完全的几何关联性,可实现制造和测量的工程审查和流程自动化。
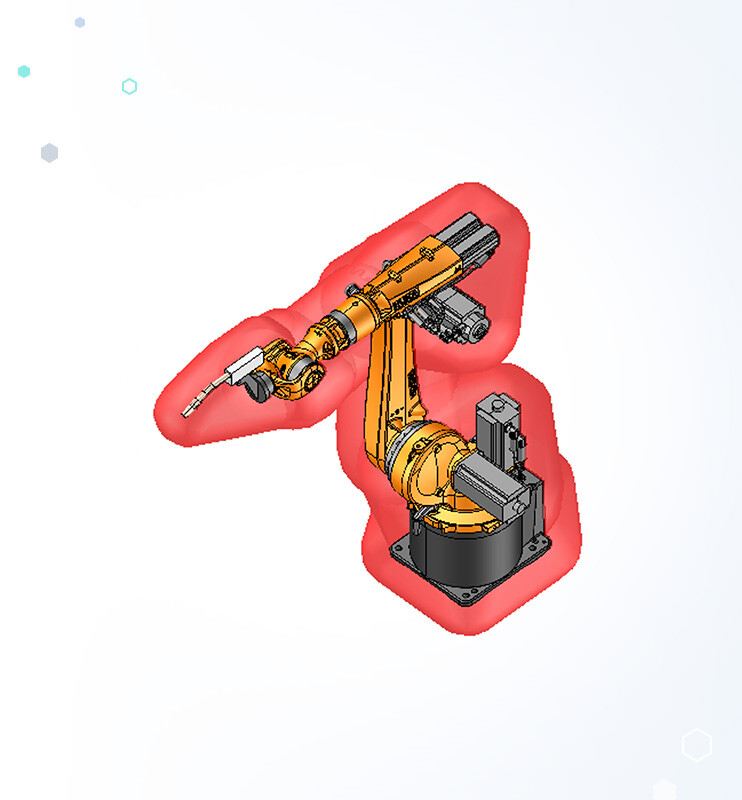
机器人路径规划和运动学管理
协调机器人运动和约束
该功能可对路径规划、运动学和逆运动学进行全面控制,包括允许交互式拖动、预定义关节、参数定位和全面诊断的高级功能。它通过并行处理实现精确、实时的运动控制和可扩展性,确保在约束条件下进行交互式运动,同时保持稳定性和几何关系。
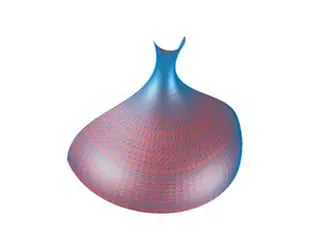

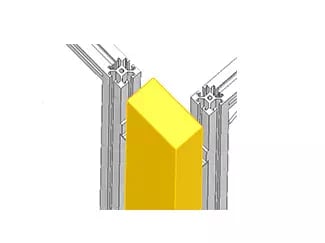
减少切面以优化几何形状
提高模型效率和处理速度
该功能通过体切除技术减少面的数量,从而简化多面体模型的复杂性。在保留模型整体几何形状的同时尽量减少面数,从而提高计算效率并缩短处理时间,在机器人工作流程中实现更快的模拟和更有效的资源利用。
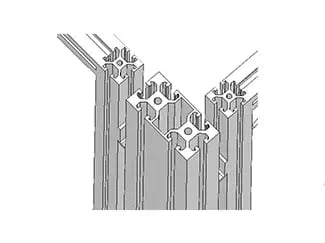
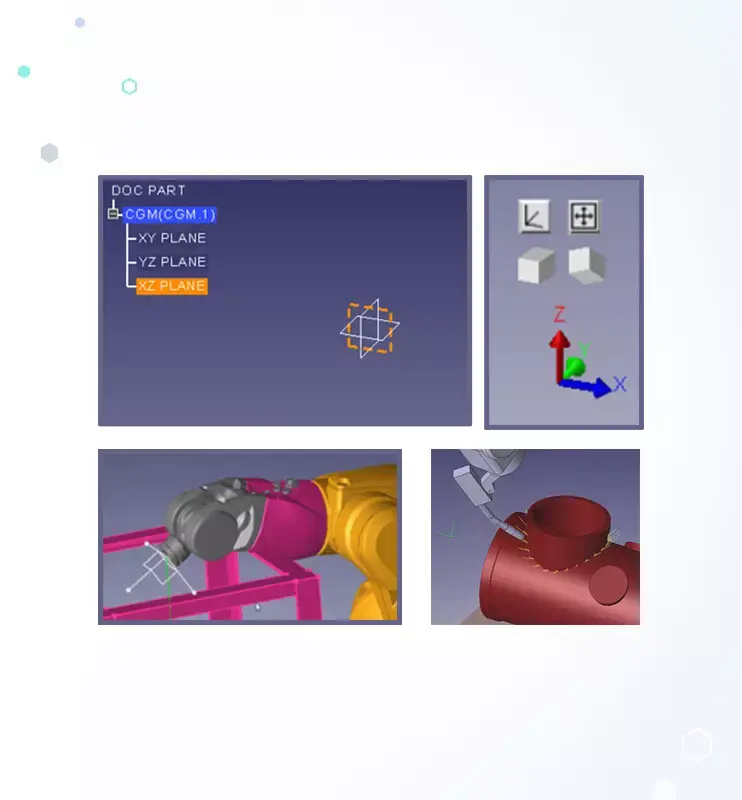
为Spatial分析创建通关量
确保运动自由度和装配效率
该操作对于在机器人组件周围生成必要的间隙体积至关重要。利用偏移和凸壳计算,它可以创建一个扩大的体积和尽可能小的凸形,将模型包括在内。这一过程对于避免碰撞、确保机器人系统内零件移动和装配有足够的空间至关重要。
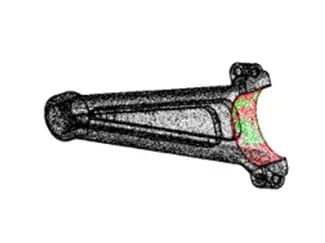
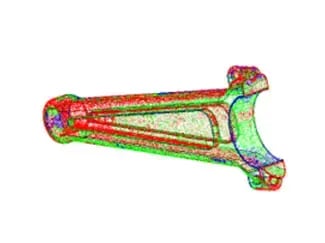
利用点云数据进行结果分析
精确测量和评估
该功能侧重于三维模型精度,将测量的点云数据与三维模型几何形状对齐。它可以计算每个数据点到表面的距离,从而与 PMI 公差进行全面比较。它采用并行化架构,为性能分析提供了快速、可扩展的解决方案,能够处理大型数据集,确保精确的制造和质量控制。
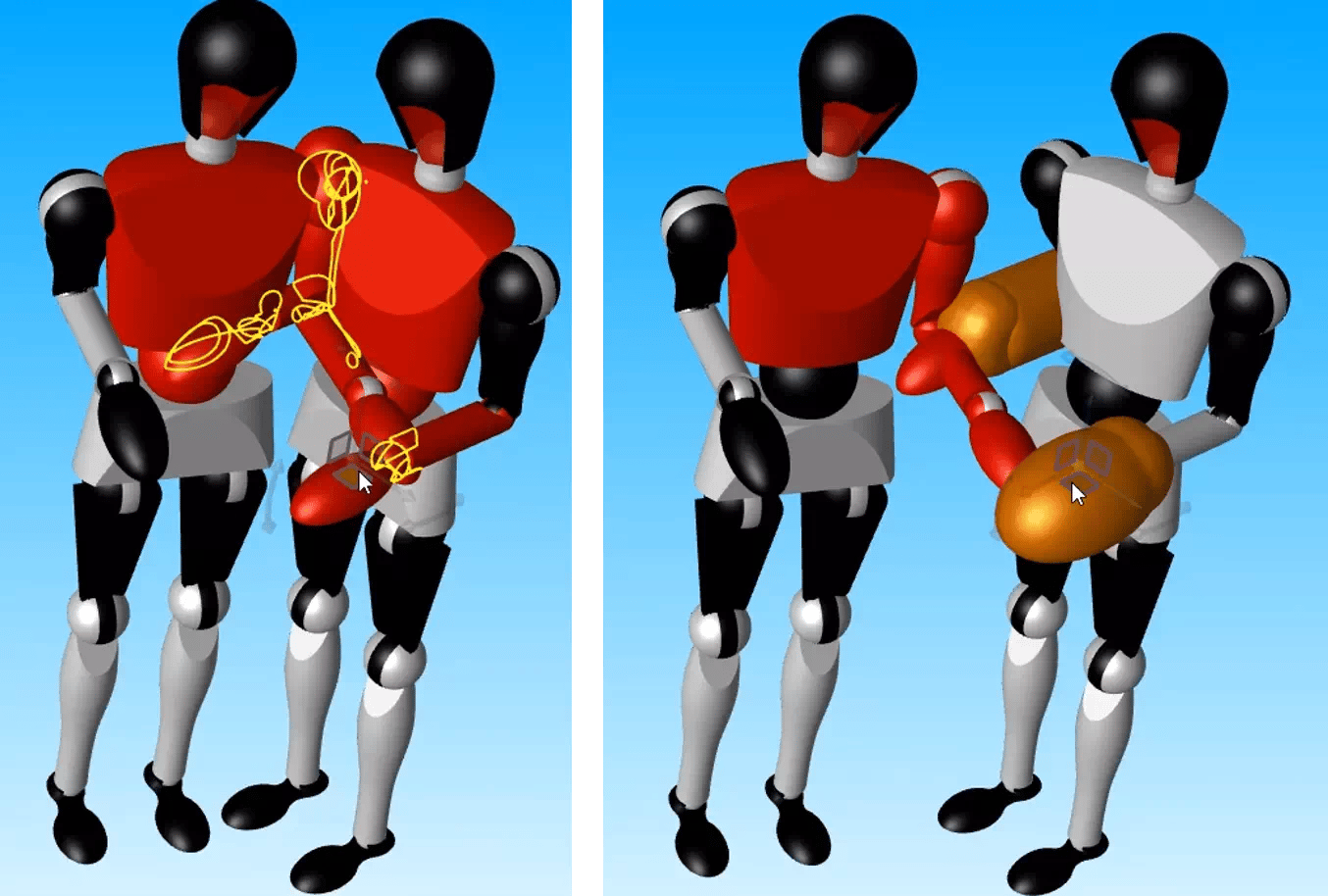
离线模拟机器人编程
安全高效的机器人导航
AGM 是与多家客户合作开发的,可大大缩短应用程序开发时间。它具有多种先进功能,可通过复杂的算法主动检测碰撞,从而增强机器人路径规划。它可定义具有间隙容积的安全区域,并在需要时在车身网格甚至特定三角形之间实现碰撞检测机器人功能。快速、多线程算法的使用确保了实时性能,这对自动化系统的平稳运行至关重要。


为什么要使用Spatial SDK?
Spatial SDK 已被世界各地的机器人软件供应商广泛采用。
我们高度可定制的解决方案和对长期创新的支持使您能够
满足客户的特殊要求。因为我们会根据您的软件量身定制解决方案和工作流程
我们的解决方案和工作流程都是根据您的软件量身定制的。
在目标功能方面领先于竞争对手。
我们高度可定制的解决方案和对长期创新的支持使您能够
满足客户的特殊要求。因为我们会根据您的软件量身定制解决方案和工作流程
我们的解决方案和工作流程都是根据您的软件量身定制的。
在目标功能方面领先于竞争对手。
缩短应用程序开发时间
实施应用图形管理器(AGM)后,开发时间将大大缩短。该应用框架集成了不同的Spatial组件,由于具有弧焊、点焊、快速碰撞检查和逆运动学功能,在机器人软件开发人员中非常成功。
与行业机器人技术领导者合作
我们的许多解决方案都是与著名的机器人技术领导者合作开发的。机器人领域的主要企业使用 Spatial SDK 是有原因的。
独家功能
Spatial 的机器人 SDK 所提供的功能在业内非常独特。
一站式服务
Spatial 久经行业考验的 SDK 通过一个值得信赖的合作伙伴关系完善了您的机器人应用。
我们所有的机器人资源

Stäubli借助Spatial SDK提升产品与能力
Stäubli Robotics Suite 2022在Spatial的CGM Modeler支持下,为复杂自动化场景提供了优化功能。
ABB实现不停产编程
ABB机器人部门使用RobotStudio软件进行基于PC的机器人编程,提升生产力且无需停产。
机床制造企业的终极指南
为机床供应商提供的三部分指南,内容涵盖如何通过软件差异化提升硬件销售,以及如何选择合适的开发工具包。
Automatic CAM (ACAM) in Subtractive CNC Machining
Discover Automatic CAM, the enabling processes, and its application benefits.
Bring Your Assembly Modeling to Life with Parametric Constraint Management
Learn how you can enable constraint management and assembly modeling in your 3D application with Spatial’s Constraint Design Solver SDK.

主办方
David Hornsby
Bring Your Assembly Modeling to Life with Parametric Constraint Management
Learn how you can enable constraint management and assembly modeling in your 3D application with Spatial’s Constraint Design Solver SDK.
David Hornsby
CAM工作流程的未来
探索当前和未来的计算机辅助制造 (CAM) 工作流程,以及提升 CAM 的方法。
应用程序生命周期管理
一本介绍应用程序生命周期管理、其选项以及它如何增强应用程序的电子书。
CGM Modeler: A Platform for Innovation
Learn how CGM Modeler enables application development for creating, modifying, querying, and visualizing 3D data across industries.
8 Reasons Why Developers Switch to HOOPS Visualize
Learn why companies transition from homegrown graphics solutions to HOOPS Visualize and what the switch entails.
数据的第二生命
了解模型修复和验证、其对建模操作的影响以及详细的测试结果。

.jpg?width=1440&name=Application-of-Arc-Welding-in-Application-Graphics-Manager-(AGM).jpg)
