



The Challenge
To prepare for long-term innovation, Stäubli partnered with Spatial in search of a powerful 3D engine that could unlock new capabilities in their robotics software. This collaboration led to the release of the Robotics Suite 2022, delivering enhanced development tools and expanded functionality, from design to production.
By integrating Spatial SDKs, Stäubli achieved high-quality 3D representations that were previously unattainable, setting the stage for the next decade of robotics advancement.

The world of possibilities in the robotics industry is exciting. Robots are the most flexible equipment to automate production. Working with Spatial means working with the leader in 3D environments and gives us even more confidence about the solution that we bring to our customers.
They Trust Us



Key Challenges in Robotics Software Development
-
Offline Programming (OLP) Adoption
Developing solutions for efficient and safe offline programming to replace manual techniques, minimizing downtime and safety risks.
-
Seamless System Integration
Ensuring control software, simulation tools, and user interfaces operate harmoniously across diverse platforms for robust interoperability.
-
Reducing Material and Time Costs
Integrating complex robotic systems with manufacturing processes to optimize resource usage and streamline operations.
-
Optimizing Design and Workflow
Shortening design cycles, reducing errors, and creating software that accommodates design constraints and specific end-user workflows.
How Our SDKs Address
Key Robotics Challenges
Powerful Application Framework Integrating Different Spatial Components
Application Graphics Manager (AGM) is popular with robotics customers worldwide. AGM was built in collaboration with several robotics customers and has specific tabs for arc welding and robotics, allowing users to easily demo arc welding, spot welding, fast collision checks and inverse kinematics. These features enable application development time to be reduced by a significant amount.
Interoperability for Robotics Applications
Load or import data for robots, workpieces, facilities and more with 3D InterOp. Data from different sources can be integrated, facilitating collaboration and data consistency in the digital factory.

Powerful 3D Engines
With the power of CGM Modeler, 3D ACIS Modeler, and CGM Polyhedra, you can generate teaching points as well as layout robots and workpieces in your application.
Sharp Visualization and Motion
Simulate motion with CDS or AGM for inverse kinematics and HOOPS Visualize for animations. Gain sophisticated support for digital factory twins.
Features Built for Robotics Workflows
Spatial’s solutions have built-in functionality that targets the unique needs of the robotics industry and digital factories.
Whether you’re working with digital twins, automation and robotics, additive manufacturing, or simulation and optimization,
the features of Spatial SDKs help you meet your development goals.
Whether you’re working with digital twins, automation and robotics, additive manufacturing, or simulation and optimization,
the features of Spatial SDKs help you meet your development goals.
Semantic PMI Import
Robotic Path Planning and Kinematics Management
Facet Reduction for Optimized Geometry
Clearance Volume Creation for Spatial Analysis
Result Analysis with Point-Cloud Data
Offline Robot Programming for Simulation
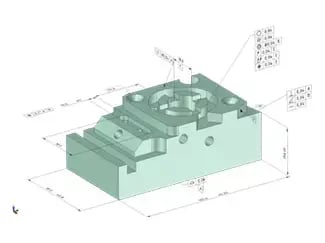
Semantic PMI Import
Capturing Design Intent
3D InterOp supports product manufacturing information in graphical and semantic form with full geometrical associativity, enabling engineering reviews and process automation for manufacturing and measurement.

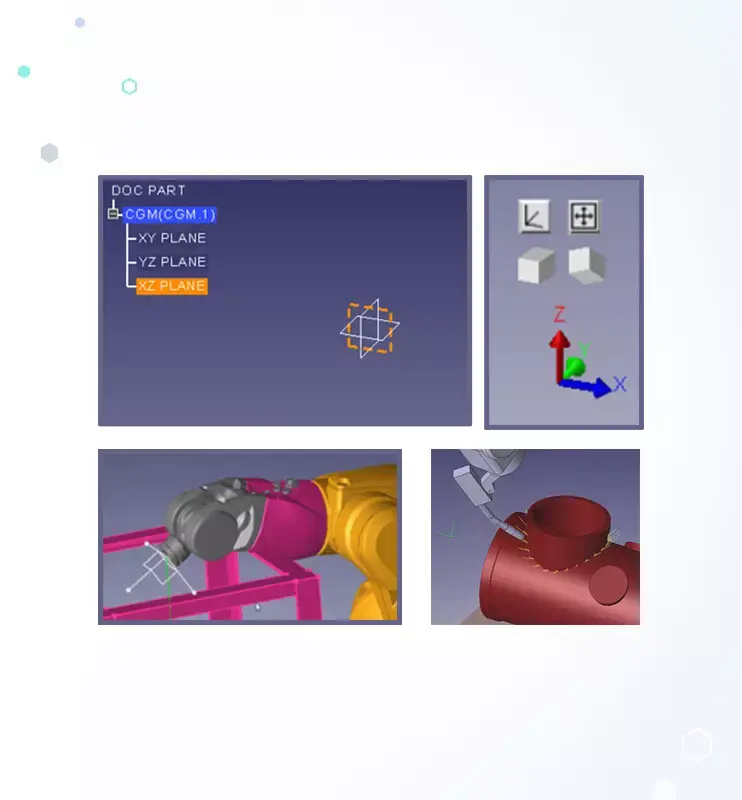
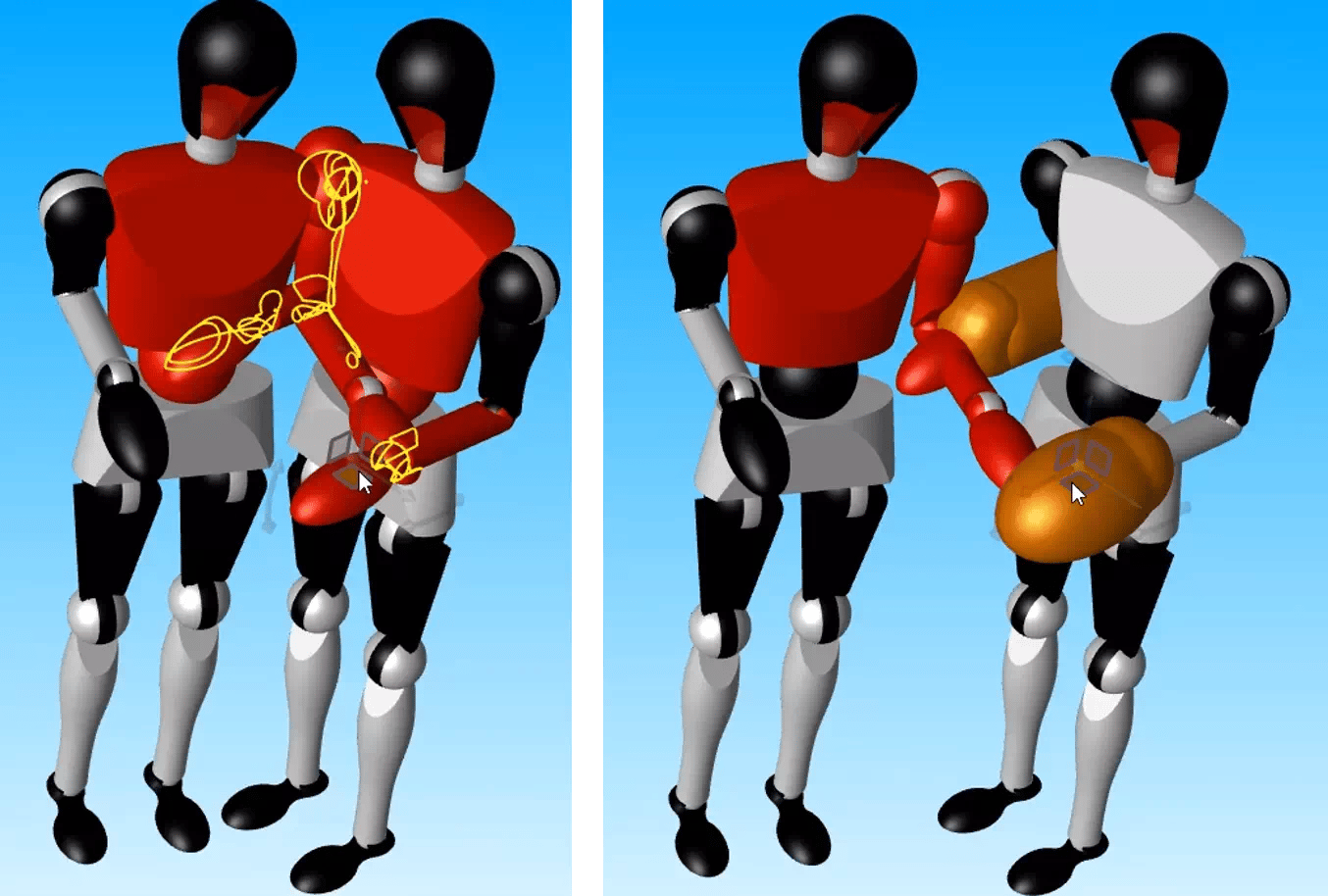
Robotic Path Planning and Kinematics Management
Orchestrating Robotic Movements and Constraints
This feature offers comprehensive control over path planning, kinematics and inverse kinematics, including advanced capabilities to allow interactive dragging, pre-defined joints, parametric positioning and comprehensive diagnostics. It enables precise, real-time motion control and scalability through parallel processing, ensuring interactive movement under constraints while maintaining stability and geometrical relationships.



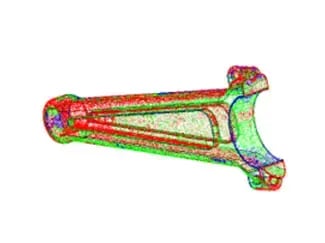
Facet Reduction for Optimized Geometry
Enhancing Model Efficiency and Processing Speed
This feature streamlines the complexity of polyhedral models by reducing the number of facets through body decimation techniques. Minimizing facet count while retaining the model's overall geometric shape improves computational efficiency and reduces processing time, enabling faster simulations and more effective use of resources in robotic workflows.

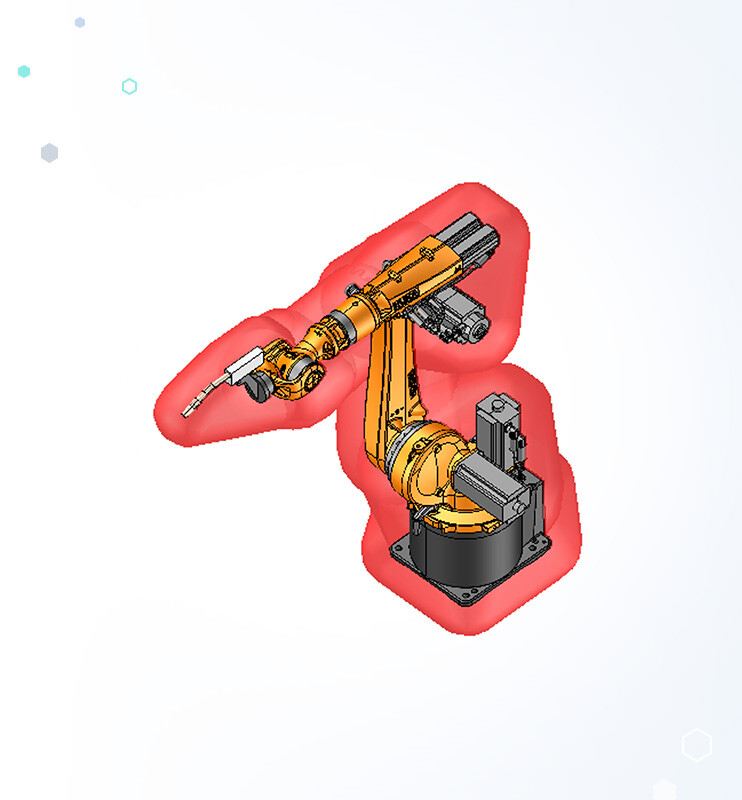
Clearance Volume Creation for Spatial Analysis
Ensuring Movement Freedom and Assembly Efficiency
This operation is essential for generating necessary clearance volumes around robotic components. Utilizing offset and convex hull calculations, it creates an expanded volume and the smallest possible convex shape that encompasses the model. This process is critical for avoiding collisions and ensuring adequate space for part movement and assembly within robotic systems.

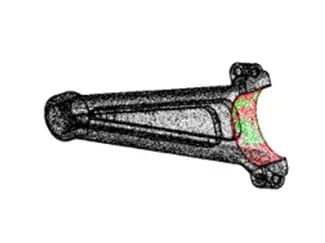
Result Analysis with Point-Cloud Data
Precision Measurement and Evaluation
Focusing on 3D model accuracy, this feature aligns measured point-cloud data to the 3D model geometry. It calculates distances from each data point to the surface, enabling a thorough comparison with PMI tolerances. With its parallelized architecture, it offers a fast and scalable solution for performance analysis, capable of handling large data sets and ensuring precise manufacturing and quality control.

Offline Robot Programming for Simulation
Safe and Efficient Robotic Navigation
Built in collaboration with several customers, AGM enables you to cut down application development time by a significant amount. It offers several advanced features that enhance robotic path planning by proactively detecting collisions using sophisticated algorithms. It defines safe zones with clearance volumes and enables clash detection robotics between body meshes or even specific triangles when needed. The use of a rapid, multi-threaded algorithm ensures real-time performance, essential for the smooth operation of automated systems.


1. File open
- Import geometry
- Visualization data
- Dimensions and tolerances

2. Teaching
- Query geometry
- Samples surfaces and curves
- Offset surfaces

3. Simulate Motion
- Inverse kinematics
- Collision detection

4. Check and optimize
- Bounding box checks
- Body-body checks
- Tessellation checks
- Fast-collision checks

5. Visualization
- Desktop and web browser