
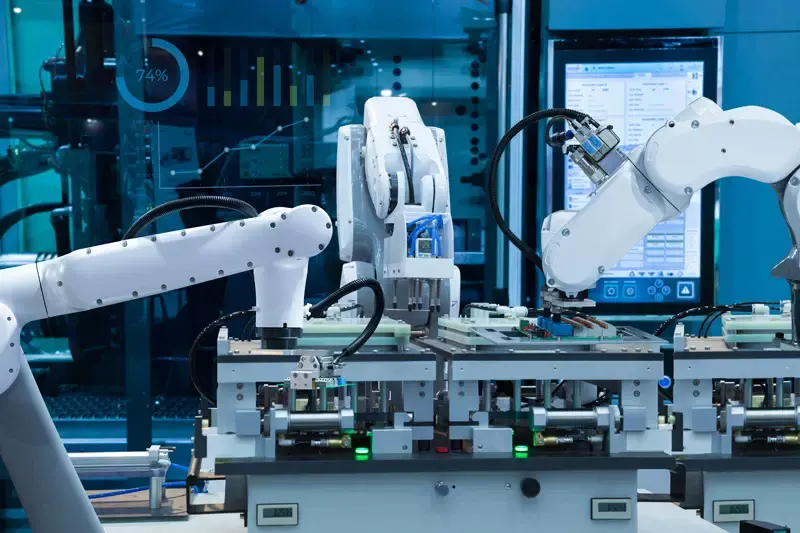
Wachsende Anforderungen mit den 3D-Robotik-SDKs von Spatial erfüllen
Verschaffen Sie sich durch die Implementierung von Spatial Software Development Kits (SDKs) einen entscheidenden Vorteil gegenüber Ihrer Konkurrenz. Unsere SDKs für automatisierte Maschinen wurden in enger Zusammenarbeit mit führenden Unternehmen der Robotikbranche entwickelt und sind auf Ihre Anwendung zugeschnitten. Ermöglichen Sie erweiterte Funktionen und komplexe Automatisierungsszenarien in Ihrer Anwendung, um die Effizienz Ihrer Arbeitsabläufe erheblich zu steigern.



Ihre Herausforderungen
Schlüsselherausforderungen in der Robotik
Software-Entwicklung
Einführung der Offline-Programmierung (OLP)
Entwicklung von Lösungen für eine effiziente und sichere Offline-Programmierung als Ersatz für manuelle Techniken, um Stillstand und Sicherheitsrisiken zu minimieren.Nahtlose Systemintegration
Wir stellen sicher, dass Steuerungssoftware, Simulationswerkzeuge und Benutzeroberflächen über verschiedene Plattformen hinweg harmonisch funktionieren und eine robuste Interoperabilität gewährleisten.Senkung der Material- und Zeitkosten
Integration komplexer Robotersysteme in Fertigungsprozesse zur Optimierung der Ressourcennutzung und Rationalisierung der Abläufe.Optimierung von Design und Workflow
Verkürzung der Entwurfszyklen, Verringerung von Fehlern und Erstellung von Software, die sich an Entwurfseinschränkungen und spezifische Arbeitsabläufe der Endbenutzer anpasst.



Wie unsere SDKs die
Schlüsselherausforderungen in der Robotik adressieren
Leistungsstarkes Anwendungsframework zur Integration verschiedener Spatial Komponenten
Der Application Graphics Manager (AGM) ist bei Robotik-Kunden weltweit beliebt. AGM wurde in Zusammenarbeit mit mehreren Robotik-Kunden entwickelt und verfügt über spezielle Registerkarten für Lichtbogenschweißen und Robotik, mit denen Benutzer Lichtbogenschweißen, Punktschweißen, schnelle Kollisionsprüfungen und inverse Kinematik einfach demonstrieren können. Dank dieser Funktionen kann die Entwicklungszeit für Anwendungen erheblich verkürzt werden.
Interoperabilität für Robotik-Anwendungen
Laden oder importieren Sie mit 3D InterOp Daten für Roboter, Werkstücke, Anlagen usw. Daten aus verschiedenen Quellen können integriert werden und erleichtern so die Zusammenarbeit und Datenkonsistenz in der digitalen Fabrik.

Leistungsstarke 3D-Engines
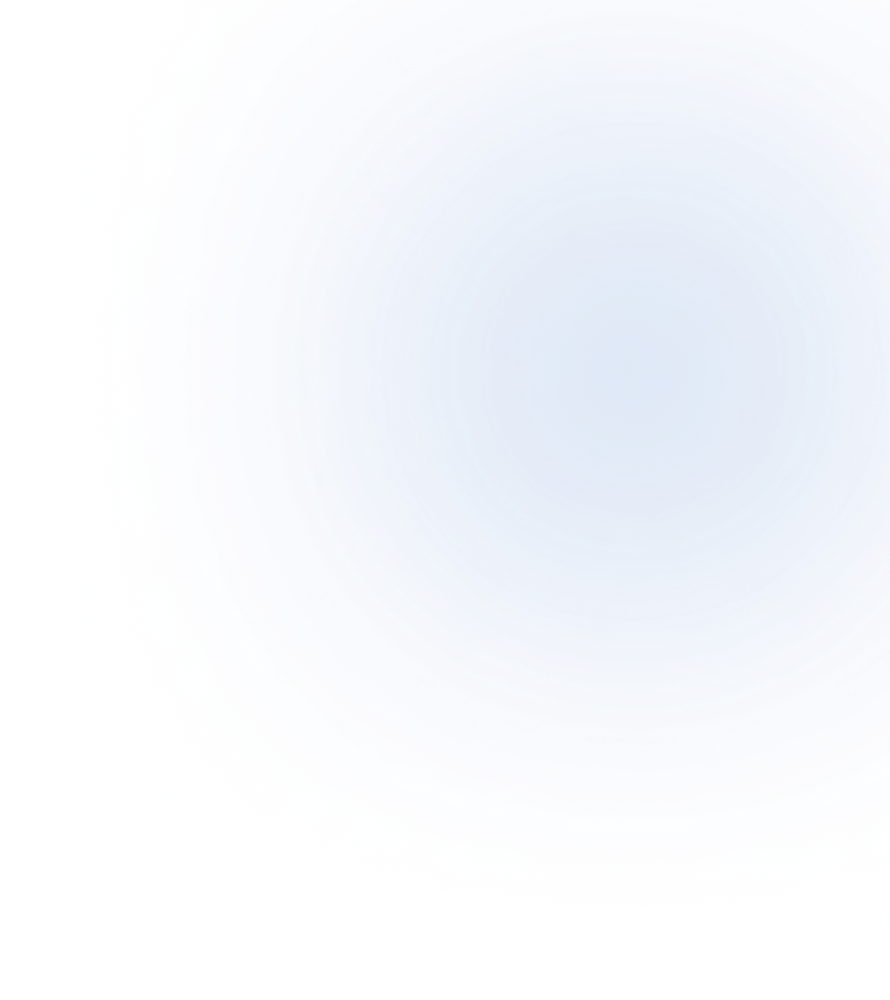
Mit der Leistungsfähigkeit von CGM Modeler, 3D ACIS Modeler und CGM Polyhedra können Sie in Ihrer Anwendung sowohl Teachpunkte erzeugen als auch Roboter und Werkstücke anordnen.
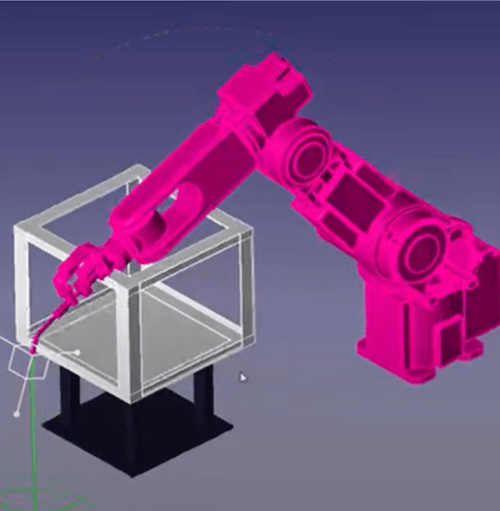
Scharfe Visualisierung und Bewegung
Simulieren Sie Bewegungen mit CDS oder AGM für inverse Kinematik und HOOPS Visualize für Animationen. Gewinnen Sie anspruchsvolle Unterstützung für digitale Fabrikzwillinge.

1. Datei öffnen
- Geometrie importieren
- Daten visualisieren
- Abmessungen und Toleranzen


2. Teaching
- Abfrage der Geometrie
- Flächen und Kurven abtasten
- Offset Flächen




3. Bewegung simulieren
- Inverse Kinematik
- Kollisionserkennung



4. Prüfen und optimieren
- Bounding-Box-Kontrollen
- Körper-Körper-Prüfungen
- Tesselation-Prüfungen
- Schnellkollisionsprüfungen

5. Visualisierung
- Desktop und Webbrowser
Funktionen für Robotik-Workflows
Die Lösungen von Spatial verfügen über integrierte Funktionen, die auf die besonderen Anforderungen der Robotikbranche und der digitalen Fabriken ausgerichtet sind.
Ob Sie nun mit digitalen Zwillingen, Automatisierung und Robotik, additiver Fertigung oder Simulation und Optimierung arbeiten,
die Funktionen der Spatial SDKs helfen Ihnen, Ihre Entwicklungsziele zu erreichen.
Ob Sie nun mit digitalen Zwillingen, Automatisierung und Robotik, additiver Fertigung oder Simulation und Optimierung arbeiten,
die Funktionen der Spatial SDKs helfen Ihnen, Ihre Entwicklungsziele zu erreichen.
Semantischer PMI-Import
Roboterbahnplanung und Kinematikmanagement
Facettenreduktion für optimierte Geometrie
Erstellung von Offsetvolumen für die räumliche Analyse
Ergebnisanalyse mit Punktwolkendaten
Offline-Roboterprogrammierung für die Simulation
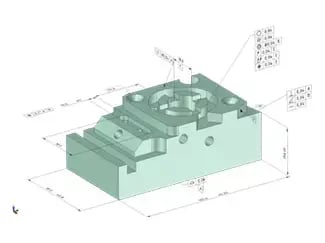
Semantischer PMI-Import
Erfassen von Konstruktionsabsichten
3D InterOp unterstützt Produktherstellungsinformationen in grafischer und semantischer Form mit vollständiger geometrischer Assoziativität und ermöglicht so technische Überprüfungen und Prozessautomatisierung für Fertigung und Messung.
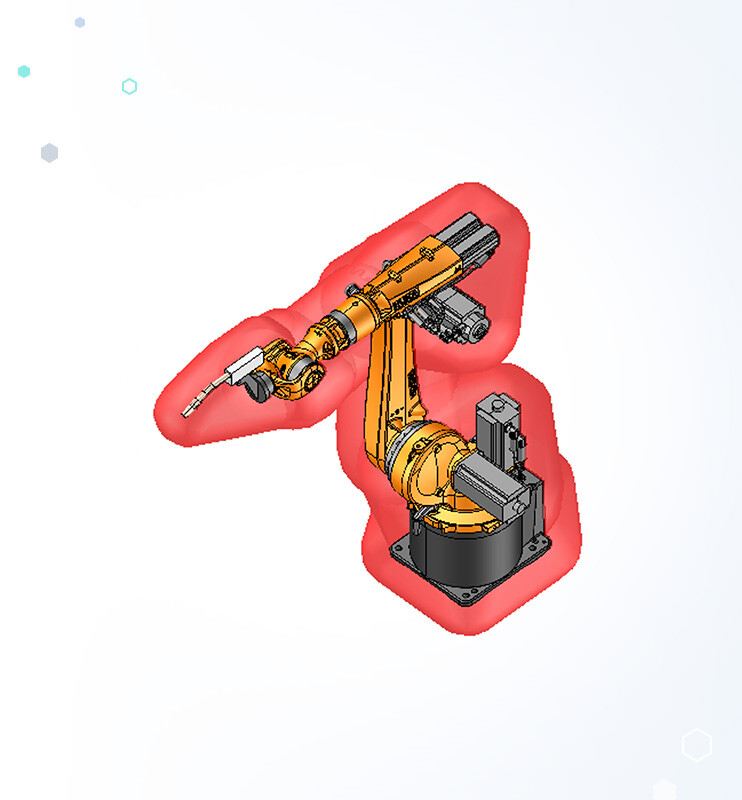
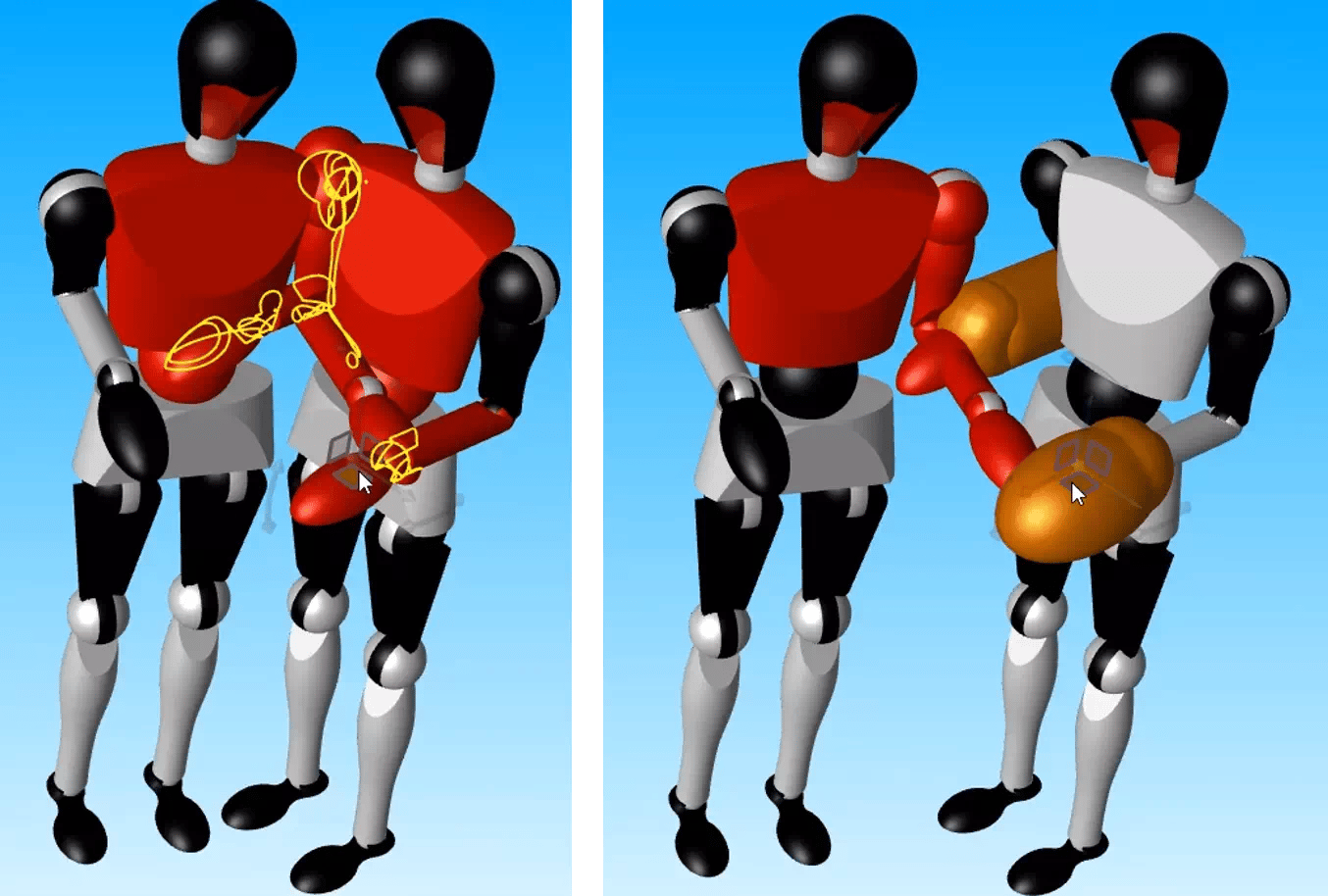
Roboterbahnplanung und Kinematikmanagement
Arrangieren von Roboterbewegungen und -beschränkungen
Diese Funktion bietet umfassende Kontrolle über Bahnplanung, Kinematik und inverse Kinematik, einschließlich fortschrittlicher Funktionen für interaktives Ziehen, vordefinierte Gelenke, parametrische Positionierung und umfassende Diagnose. Sie ermöglicht eine präzise Bewegungssteuerung in Echtzeit und Skalierbarkeit durch parallele Verarbeitung, die eine interaktive Bewegung unter Einhaltung von Beschränkungen und unter Beibehaltung von Stabilität und geometrischen Beziehungen gewährleistet.
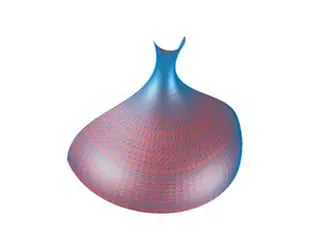

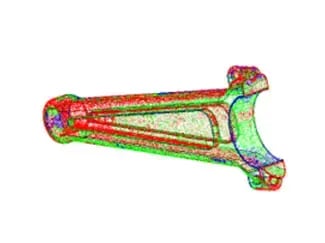
Facettenreduktion für optimierte Geometrie
Höhere Modelleffizienz und Verarbeitungsgeschwindigkeit
Diese Funktion rationalisiert die Komplexität polyedrischer Modelle, indem sie die Anzahl der Facetten durch Körperdezimierungsverfahren reduziert. Die Minimierung der Facettenanzahl bei gleichzeitiger Beibehaltung der geometrischen Gesamtform des Modells verbessert die Berechnungseffizienz und verkürzt die Verarbeitungszeit, was schnellere Simulationen und eine effektivere Nutzung der Ressourcen in Roboter-Workflows ermöglicht.
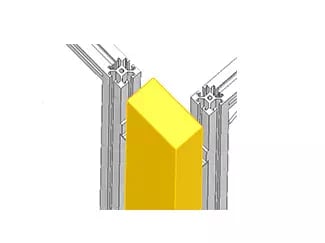
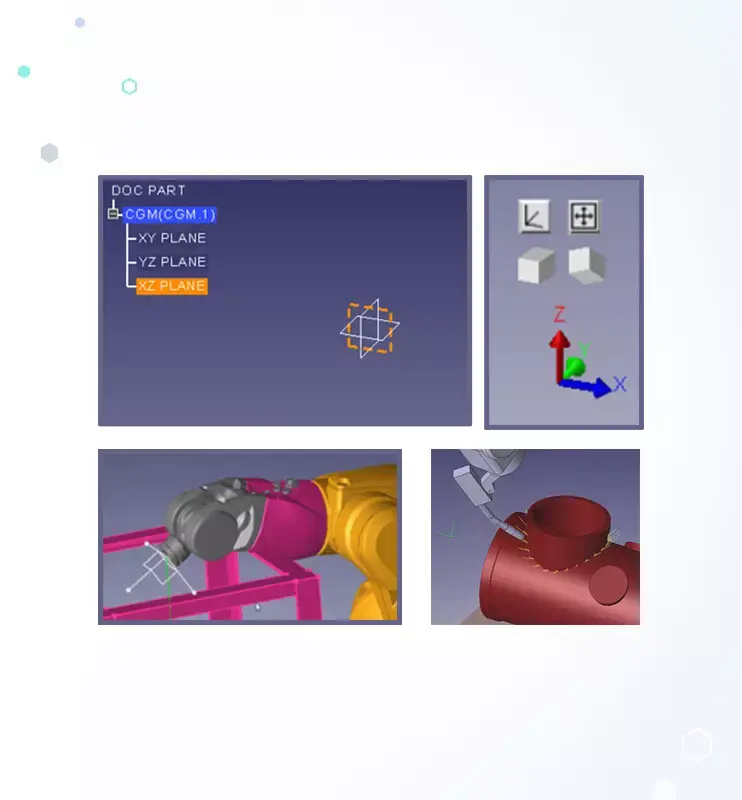
Erstellung von Offsetvolumen für die räumliche Analyse
Sicherstellung von Bewegungsfreiheit und Effizienz
Dieser Vorgang ist unerlässlich, um die erforderlichen Abstände um die Roboterkomponenten herum zu schaffen. Unter Verwendung von Offset- und Konvexhüllenberechnungen werden ein erweitertes Volumen und die kleinstmögliche konvexe Form erzeugt, die das Modell umschließt. Dieser Prozess ist entscheidend für die Vermeidung von Kollisionen und die Gewährleistung eines ausreichenden Abstands für die Bewegung und Montage von Teilen in Robotersystemen.
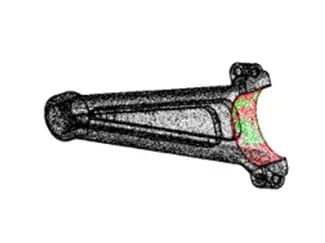
Ergebnisanalyse mit Punktwolkendaten
Präzisionsmessung und -auswertung
Diese Funktion konzentriert sich auf die Genauigkeit des 3D-Modells und gleicht die gemessenen Punktwolkendaten mit der Geometrie des 3D-Modells ab. Sie berechnet die Abstände zwischen jedem Datenpunkt und der Oberfläche und ermöglicht so einen gründlichen Vergleich mit den PMI-Toleranzen. Mit seiner parallelisierten Architektur bietet es eine schnelle und skalierbare Lösung für die Leistungsanalyse, die in der Lage ist, große Datensätze zu verarbeiten und eine präzise Fertigung und Qualitätskontrolle zu gewährleisten.
Offline-Roboterprogrammierung für die Simulation
Sichere und effiziente Roboternavigation
AGM wurde in Zusammenarbeit mit mehreren Kunden entwickelt und ermöglicht es Ihnen, die Entwicklungszeit von Anwendungen erheblich zu verkürzen. Es bietet mehrere fortschrittliche Funktionen, die die Roboterbahnplanung durch die proaktive Erkennung von Kollisionen mithilfe hochentwickelter Algorithmen verbessern. Es definiert sichere Zonen mit Freiräumen und ermöglicht bei Bedarf die Kollisionserkennung zwischen Karosserienetzen oder sogar bestimmten Dreiecken. Der Einsatz eines schnellen Multi-Thread-Algorithmus sorgt für eine Echtzeitleistung, die für den reibungslosen Betrieb von automatisierten Systemen unerlässlich ist.


Warum mit Spatial SDKs arbeiten?
Spatial SDKs werden von Robotik-Softwareanbietern auf der ganzen Welt eingesetzt.
Unsere hochgradig anpassbaren Lösungen und unsere Unterstützung für langfristige Innovationen ermöglichen es Ihnen
die spezifischen Anforderungen Ihrer Kunden zu erfüllen. Da wir unsere Lösungen und Arbeitsabläufe
genau auf Ihre Software zuschneiden, treten Sie mit einer Anwendung auf, die in ihrer zielgerichteten Funktionalität der Konkurrenz voraus ist.
Unsere hochgradig anpassbaren Lösungen und unsere Unterstützung für langfristige Innovationen ermöglichen es Ihnen
die spezifischen Anforderungen Ihrer Kunden zu erfüllen. Da wir unsere Lösungen und Arbeitsabläufe
genau auf Ihre Software zuschneiden, treten Sie mit einer Anwendung auf, die in ihrer zielgerichteten Funktionalität der Konkurrenz voraus ist.
Verkürzung der Anwendungsentwicklungszeit
Beobachten Sie, wie sich Ihr Zeitaufwand für die Entwicklung verringert, wenn Sie den Application Graphics Manager (AGM) implementieren. Dieses Anwendungsframework integriert verschiedene Spatial-Komponenten und ist bei Entwicklern von Robotersoftware aufgrund seiner Funktionen für Lichtbogenschweißen, Punktschweißen, schnelle Kollisionsprüfungen und inverse Kinematik sehr erfolgreich.
Zusammenarbeit mit führenden Unternehmen der Robotik-Branche
Viele unserer Lösungen wurden in Zusammenarbeit mit bekannten Robotik-Führern entwickelt. Nicht umsonst verwenden wichtige Akteure in der Robotikbranche die SDKs von Spatial.
Exklusive Fähigkeiten
Die von den Robotik-SDKs von Spatial bereitgestellte Funktionalität ist in der Branche einzigartig.
One Stop Shop
Die branchenerprobten SDKs von Spatial vervollständigen Ihre Robotikanwendung mit einer zuverlässigen Partnerschaft.
Alle unsere Robotik Quellen

Stäubli Elevated Their Offerings and Capabilities with Spatial's SDKs
Stäubli Robotics Suite 2022 offered optimized features for complex automation scenarios, enabled by Spatial’s CGM Modeler.
ABB's Programming Without Shutting Down Production
ABB’s Robotics Division used RobotStudio software for PC-based robot programming, boosting productivity without production shutdowns.
A 3 Part Guide for Machine Tool Manufacturers
A 3-part guide for Machine Tool Suppliers on boosting hardware sales through software differentiation and choosing the right development toolkit.
Automatic CAM (ACAM) in Subtractive CNC Machining
Discover Automatic CAM, the enabling processes, and its application benefits.
Bring Your Assembly Modeling to Life with Parametric Constraint Management
Learn how you can enable constraint management and assembly modeling in your 3D application with Spatial’s Constraint Design Solver SDK.

Hosted by
David Hornsby
Bring Your Assembly Modeling to Life with Parametric Constraint Management
Learn how you can enable constraint management and assembly modeling in your 3D application with Spatial’s Constraint Design Solver SDK.
David Hornsby
The Future of CAM Workflows
Explore current and future Computer-Aided Manufacturing workflows and ways to enhance CAM.
Application Lifecycle Management
An eBook introducing Application Lifecycle Management, its options, and how it enhances applications.
CGM Modeler: A Platform for Innovation
Learn how CGM Modeler enables application development for creating, modifying, querying, and visualizing 3D data across industries.
8 Reasons Why Developers Switch to HOOPS Visualize
Learn why companies transition from homegrown graphics solutions to HOOPS Visualize and what the switch entails.
The Second Life of Data: How 3D InterOp From Spatial Powers Data Reuse
Understand model repair and validation, its impact on modeling operations, and detailed test results.

.jpg?width=1440&name=Application-of-Arc-Welding-in-Application-Graphics-Manager-(AGM).jpg)
